

软体机器人使用粘性流体进行复杂运动
康奈尔大学的研究人员开发了一种流体驱动驱动器系统,使软体机器人能够实现更复杂的运动。
机器人的见解
- 康奈尔大学的研究人员开发了一种流体驱动驱动器系统,使软体机器人能够通过使用粘性流体实现更复杂的运动。
- 这项技术还有助于减少显式计算的需要,这使得机器人更健壮,制造成本更低。
- 许多学院和大学正在试验如何让机器人更像人类和动物,并赋予它们更大的灵活性。
无系绳软机器人的优点之一是它们能够机械地适应周围环境和任务,使它们成为一系列角色的理想选择,从工厂的紧固螺栓到进行深海勘探。现在,它们正准备变得更加灵活和可控。
一组研究人员由社会彼得森他是工程学院电气与计算机工程的助理教授,他设计了一种新的——令人惊讶地简单——流体驱动执行器系统,使软体机器人能够实现更复杂的运动。研究人员利用之前阻碍机器人运动的粘性来实现这一目标。
团队的论文,”利用软体机器人执行器中的非均匀压力分布,发表在1月20日的《先进智能系统》杂志上。该论文的主要作者是博士后研究员Yoav Matia。
彼得森的集体体现智能实验室一直在探索如何通过机器人的机械反射和利用环境的能力,将机器人的认知能力和行为从“大脑”转移到身体上。通过减少显式计算的需要,机器人可以变得更简单,更健壮,制造成本更低。
“软体机器人的结构非常简单,但其功能却比刚性机器人灵活得多。它们是终极的具身智能机器人。”“现在大多数软体机器人都是流体驱动的。在过去,大多数人都在考虑如何通过将功能嵌入到机器人材料(如弹性体)中来获得额外的收益。相反,我们问自己如何利用流体与材料的相互作用,以更少的成本做更多的事情。”
传统上,软体机器人的流体驱动致动器——即移动的部分,如肢体——在均匀加压的流体流过弹性体膀胱或波纹管时起作用。这迫使驱动器,已被机械设计为弯曲在预定的方向,按指示移动。主要的症结是,如果执行器的内部流动是粘性的,压力平衡不同,导致执行器的运动变得迟缓,机器人速度减慢。
开发机器人模板
彼得森的团队从一个类似的模板开始,只不过他们用细长的管子连接了一系列弹性体波纹管,这些波纹管在一对平行的柱中运行,所有这些都在一个封闭的系统中。这种结构允许对抗运动——一个拉一个推。微小的管子会产生粘性,导致压力分布不均匀,使执行器弯曲成不同的扭曲和运动模式。这通常是一个问题,但该团队发现了一个巧妙的方法来利用它。
Matia开发了一个完整的描述模型,可以预测驱动器可能的运动,并预测不同的输入压力、几何形状以及管道和波纹管配置如何实现这些运动——所有这些都是通过单一流体输入实现的。这使得执行器可以实现更复杂的运动,但不需要以前的方法所需要的多个输入和复杂的反馈控制。

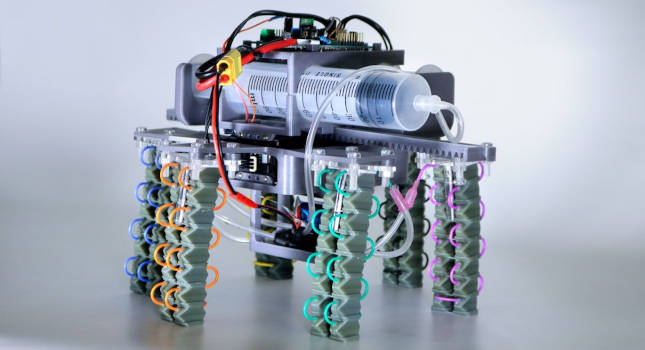
由电气和计算机工程助理教授Kirstin Petersen领导的研究人员制造了一个六条腿的软体机器人,它包含了一个新的流体驱动执行器系统,可以在更好的控制下实现更复杂的运动。提供:康奈尔大学
马蒂亚说:“今天的惰性结构材料在我们未来的机器中所起的作用将非常不同。”“它在于将代理和计算嵌入到材料中——有机的材料、制造过程和控制系统的物理现象——允许它们通过物理机制和内部结构独立发挥作用。这项工作代表了一种新的可伸缩框架,通过材料来体现对材料的控制,否则惰性结构物质就会自己发挥作用。”
为了演示这项技术,该团队制造了一个六条腿的软体机器人,上面有两个注射泵,以每秒0.05体长的速度行走,也可以蹲着。但这些只是可能的排列的开始。
Petersen说:“我们详细介绍了为未来应用设计这些驱动器的全部方法。”“例如,当执行器被用作腿时,我们证明,只要穿过一组管子,你就可以从鸵鸟般的步态(站得很宽)变成大象般的小跑。”
新型流体驱动驱动器可用于不同类型的设备,如机械臂,Petersen对如何将波纹管放置在3D配置中产生更有用的运动模式感兴趣。
“这基本上是软体机器人的一个全新子领域,”她说。“探索这个空间将会非常有趣。”
-由Chris Vavra编辑,网页内容经理,控制工程, CFE媒体与技术,cvavra@cfemedia.com.
您是否具有本内容中提到的主题的经验和专业知识?你应该考虑为我们的CFE媒体编辑团队做出贡献,并获得你和你的公司应得的认可。点击在这里开始这个过程。
