
马特·希普曼
Matt Shipman,北卡罗莱纳州立大学研究交流负责人
文章
机器人履带演示了软体机器人的运动方法
一种能在狭窄空间内前进、后退和下陷的毛毛虫型软机器人被研制出来。

轮式机器人测量叶片角度,帮助玉米种植
研究人员展示了一种能够准确测量田间玉米叶片角度的自动化技术,从而更快地为农民提供有用的数据。

不受气体、液体影响的弹性材料
研究人员已经开发出一种技术,利用液态金属制造一种不渗透气体和液体的弹性材料,这有助于提高对气体的保护。
研究人员展示用于机器接口技术的应变传感器
研究人员已经开发出一种可拉伸的应变传感器,它结合了灵敏度和范围,使其能够检测到比以前的技术应变的微小变化。

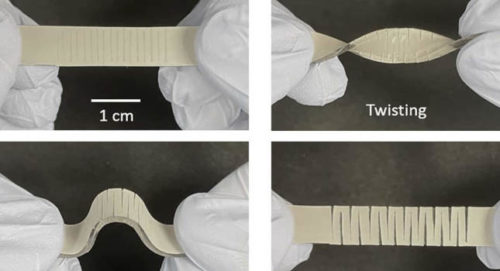
自主爬行环形机器人在狭窄的缝隙中穿行
北卡罗来纳州立大学的研究人员发明了一种环形软机器人,它能够在空气或水下的表面上拉动一个小的有效载荷,也能穿过比它的环尺寸更窄的缝隙。看到视频

网络修剪会扭曲深度学习模型
北卡罗莱纳州立大学的研究人员发现,网络修剪会对模型识别特定群体的性能产生不利影响。

Formula为AI解决了复杂的道德决策
一份能够将伦理准则更有效地纳入人工智能(AI)决策程序的算法蓝图已经被开发出来。

帮助自动驾驶汽车通过棘手的高速公路合并
如果自动驾驶汽车想要被广泛采用,我们需要知道它们能够驾驭复杂的交通状况,比如在高速公路上车道消失时,能够融入拥挤的交通。

为更快地创建人工智能模型而开发的联合学习方法
北卡罗莱纳州立大学的研究人员开发了一种联合学习方法,使他们能够更快地开发出准确的人工智能(AI)模型。

扭曲的软体机器人在没有人类或电脑引导的情况下穿行迷宫
研究人员已经开发出软体机器人,能够在没有人类或计算机软件输入的情况下在复杂的环境中导航。看到视频。